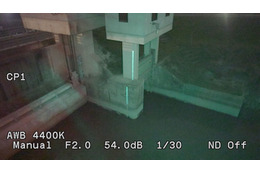
信州大学、東北大学、科学技術振興機構、内閣府政策統括官は7日、被災地での捜索活動などに用いる遠隔操作ロボットで撮影した画像から,周囲に存在するものの種別や探索対象の発見を支援するための画像認識システムの開発に成功したことを発表した。 内閣府総合科学技術・イノベーション会議が主導する革新的研究開発推進プログラム(ImPACT)タフ・ロボティクス・チャレンジの共同研究開発一環として、信州大学山崎公俊助教、アーノード・ソービ研究員、東北大学田所諭教授のグループが開発を行った。災害現場などで遠隔操作ロボットが撮影した画像を自動で解析して、探索対象の発見を支援することが可能となる。 現場に素早く対応できる認識システム、乱雑なテクスチャ状況下での環境認識、瓦礫構成物の表面状態の記述と種別の3種の研究成果から構成されており、人工知能の適用と映像からの学習を効率化する技術により、地震災害時の人名救助の効率が大幅に向上することが期待できる。 同システムはヘビ型ロボット、サイバー救助犬、ヒューマノイドロボットなど、様々なタイプのロボットへの搭載を可能としている。今後の展開として、災害利用以外にもインフラ点検や農林業,水産業などへの展開も検討されているとのこと。>>Amazonギフト券10,000円分が当たる!「ホームセキュリティアワード」投票受付中<<