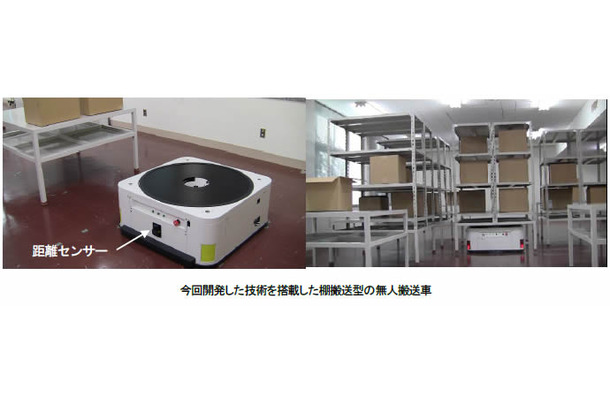
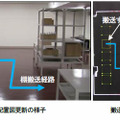
日立製作所は4日、物流倉庫などの無人搬送車に登録された倉庫内の配置図をリアルタイムに更新し、自車の位置を認識する技術を開発したことを発表した。 床面に設置するマーカーを必要とせず、無人搬送車の自律走行が可能となるため、コストダウンや自由な設備レイアウトが可能となる。 従来、棚搬送型の無人搬送車は、床面に貼られた2次元バーコードなどのマーカーを読み取ることで自車の位置を認識するため、物流倉庫では数千から数万単位の大量なマーカーが必要となり、設置コストの上昇や設備レイアウトが限定されるという問題があった。 今回の技術では、倉庫の壁や柱など「動かない領域」と、商品棚など「動く領域」を分けて管理し、配置図を無人搬送車に登録、距離センサーなどで照合することで「動く領域」の商品棚の配置のみを更新し精度を保つ。 同社では9月に東京電機大学で開催される「第33回日本ロボット学会学術講演会」で本成果を発表し、主に物流業界でのニーズを想定して、実用化を目指した研究開発に取り組んでいく。